Ciao a tutti 
Lista del materiale che potrebbe essere utile e che ho a disposizione:
6 x Emax CF2822 (3S, 175W, 28mm*46mm, albero 3mm, 39g, 1200rpm/V)
1 x Turnigy 4240-1300 (3-4S, 900W, 46mm*89mm, albero 5mm, 134g, 1300rpm/V)
Esc vari (quello grosso è per il Turnigy 4240-1300)
4 x brushless antani donati da sponsor completi di ESC. (4S, 300W, 55mm*75mm, albero 4mm, 152g, 570rpm/V)
Queste sono di esempio, ne ho di vari passi tra i 150mm e i 350mm di diametro.
Batterie LiPo varie pezzature, non basteranno comunque ma per i primi test ce le facciamo bastare.
È un telecomando carino, basato sul solito atmega 2560 con un firmware open bello succoso…
Era stato abbondantemente moddato ma una caduta durante il trasporto ha fatto saltare in piedino al micro e adesso il firmware si lamenta perchè non legge uno degli switch/pot.
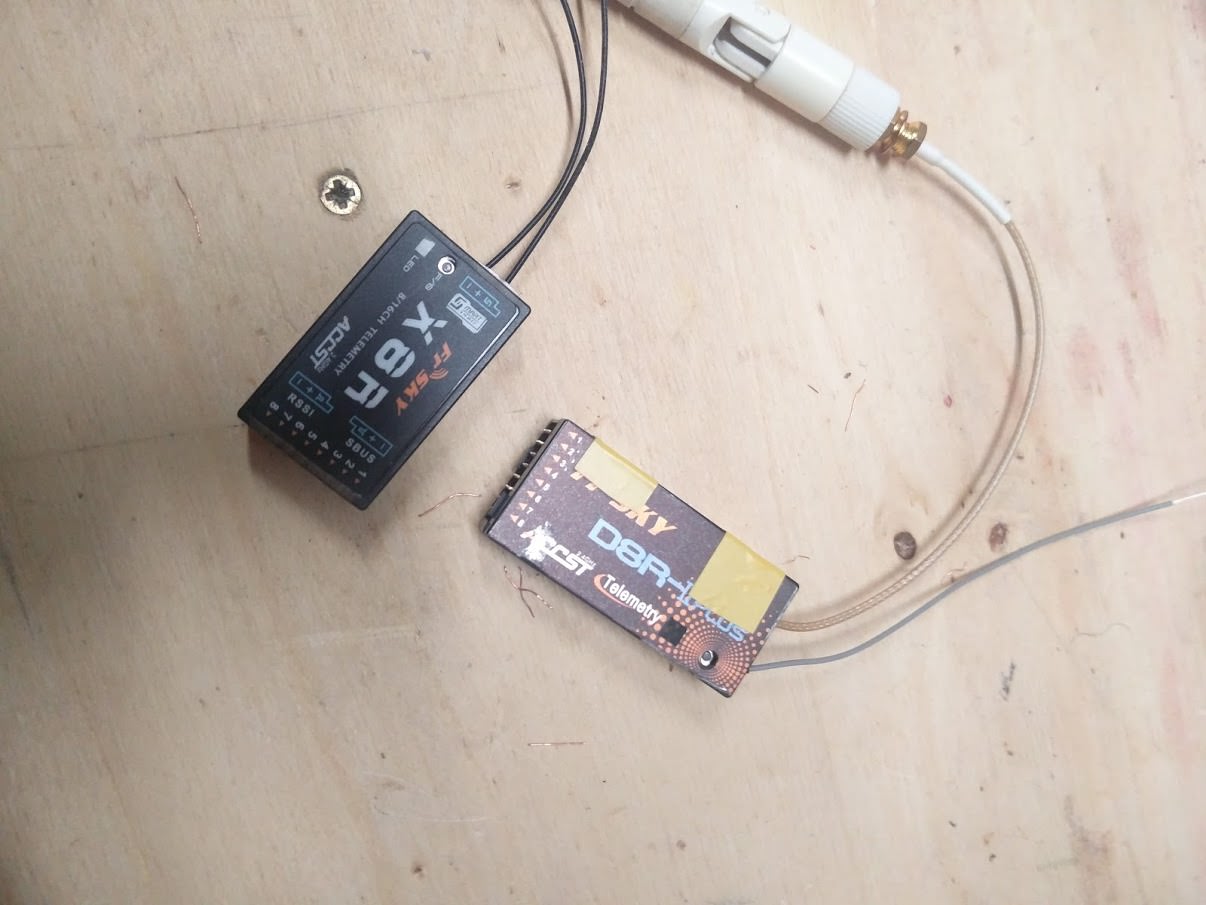
Ricevitori vari, 8canali. In teoria mandano in dietro anche un po’ di telemetria ma non abbiamo fatto in tempo a provarla qui al crunchlab.
1 x APM 2.6 (ardupilot su atmega 2560)
1 x Pixhawk (ardupilot su ARM*)
1 x modulo lettura carica batterie (penso che banalmente legga il voltaggio?)
1 x GPS ublox (modello “non mi ricordo più”)
1 x coppia radio 433mhz (all’epoca mi ricordo che reggevano fino a 10km in linea d’aria, la potenza non la so)
Funziona tutto out-of-the-box con ardupilot.